If is real, then is either 0 or . Terms of the
form
can be interpreted as a vector drawn from the point
to the point
in the complex plane. The angle of
is
the angle of the constructed vector (where a vector pointing
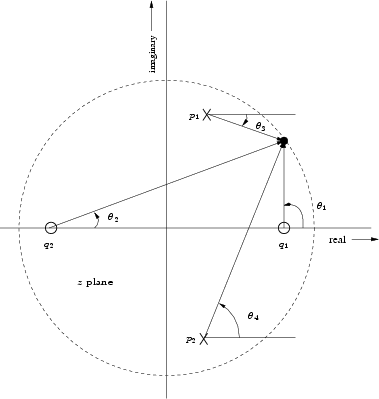
horizontally to the right has an angle of 0). Therefore, the phase
response at frequency Hz is again obtained by drawing lines from
all the poles and zeros to the point
, as shown in
Fig.8.4. The angles of the lines from the zeros are added, and
the angles of the lines from the poles are subtracted. Thus, at the
frequency the phase response of the two-pole two-zero filter
in the figure is
.
Figure 8.4:
Measurement of phase response from a pole-zero diagram.
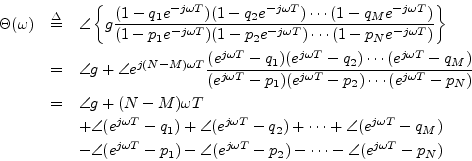
Note that an additional phase of
radians appears when
the number of poles is not equal to the number of zeros. This factor
comes from writing the transfer function as
and may be thought of as arising from additional zeros at when , or poles at when . Strictly
speaking, every digital filter has an equal number of poles and zeros
when those at and
are counted. It is customary,
however, when discussing the number of poles and zeros a filter has,
to neglect these, since they correspond to pure delay and do not
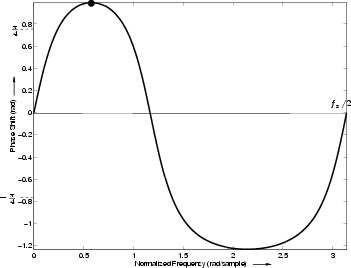
affect the amplitude response. Figure 8.5 gives the phase
response for this two-pole two-zero example.
Figure 8.5:
Phase response obtained from Fig.8.4
for positive frequencies. The point of the phase response
corresponding to the arrows in that figure is marked by a heavy
dot. For real filters, the phase response is
odd (
), so the curve
shown here may be reflected through 0 and negated
to obtain the plot for negative frequencies.