specifies the Direct-Form I (DF-I) implementation of a digital filter
[60].
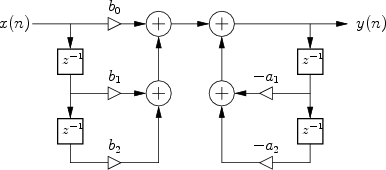
The DF-I signal flow graph for the second-order case is shown in Fig.9.1.
Figure 9.1:
Direct-Form-I implementation of a 2nd-order digital filter.
The DF-I structure has the following properties:
It can be regarded as a two-zero filter section followed in series
by a two-pole filter section.
In most fixed-point arithmetic schemes (such as two's complement,
the most commonly used
[83]10.1),
there is no possibility of internal filter overflow. That is,
since there is fundamentally only one summation point in the filter,
and since fixed-point overflow naturally ``wraps around'' from the
largest positive to the largest negative number and vice versa, then
as long as the final result is ``in range'', overflow is
avoided, even when there is overflow of intermediate results in the sum
(see below for an example). This is an important, valuable, and
unusual property of the DF-I filter structure.
There are twice as many delays as are necessary. As a result,
the DF-I structure is not canonical with respect to delay. In
general, it is always possible to implement an th-order filter
using only delay elements.
As is the case with all direct-form filter structures
(those which have coefficients given by the transfer-function coefficients),
the filter poles and zeros can be very sensitive to round-off errors
in the filter coefficients. This is usually not a problem for a
simple second-order section, such as in Fig.9.1, but it can
become a problem for higher order direct-form filters. This is the
same numerical sensitivity that polynomial roots have with respect to
polynomial-coefficient round-off. As is well known, the sensitivity
tends to be larger when the roots are clustered closely together, as
opposed to being well spread out in the complex plane
[19, p. 246]. To minimize this sensitivity, it is common to
factor filter transfer functions into series and/or parallel second-order
sections, as discussed in Chapter 9.
It is a very useful property of the direct-form I implementation
that it cannot overflow internally in two's complement fixed-point
arithmetic: As long as the output signal is in range, the filter will
be free of numerical overflow. Most IIR filter implementations do not
have this property. While DF-I is immune to internal overflow, it
should not be concluded that it is always the best choice of
implementation. Other forms to consider include
parallel and series second-order sections (§9.2 below),
and
normalized ladder forms [32,48,86].10.2Also, we'll see that the transposed direct-form II
(Fig.9.4 below) is a strong contender as well.